
Vijesti
 Dom / Vijesti / Vijesti o industriji / Kako odabrati pravi vodoravni zakretni pogon za svoju primjenu?
Dom / Vijesti / Vijesti o industriji / Kako odabrati pravi vodoravni zakretni pogon za svoju primjenu? Kako odabrati pravi vodoravni zakretni pogon za svoju primjenu?
 2026.05.13
2026.05.13
 Vijesti o industriji
Vijesti o industriji
Odabir pravog vodoravnog zakretnog pogona jedna je od onih odluka koje na prvi pogled izgledaju jednostavno, ali brzo otkrivaju slojeve složenosti kada se udubite u zahtjeve primjene. Loš odabir ne samo da ima loš učinak — on prerano otkazuje, stvara teret održavanja, au sigurnosnim kritičnim sustavima može uzrokovati skupe zastoje ili nezgode. Ovaj vodič prolazi kroz svaku značajnu varijablu odabira, dajući inženjerima i stručnjacima za nabavu praktičan okvir za donošenje pravog poziva prvi put.
Što horizontalni zakretni pogon zapravo radi
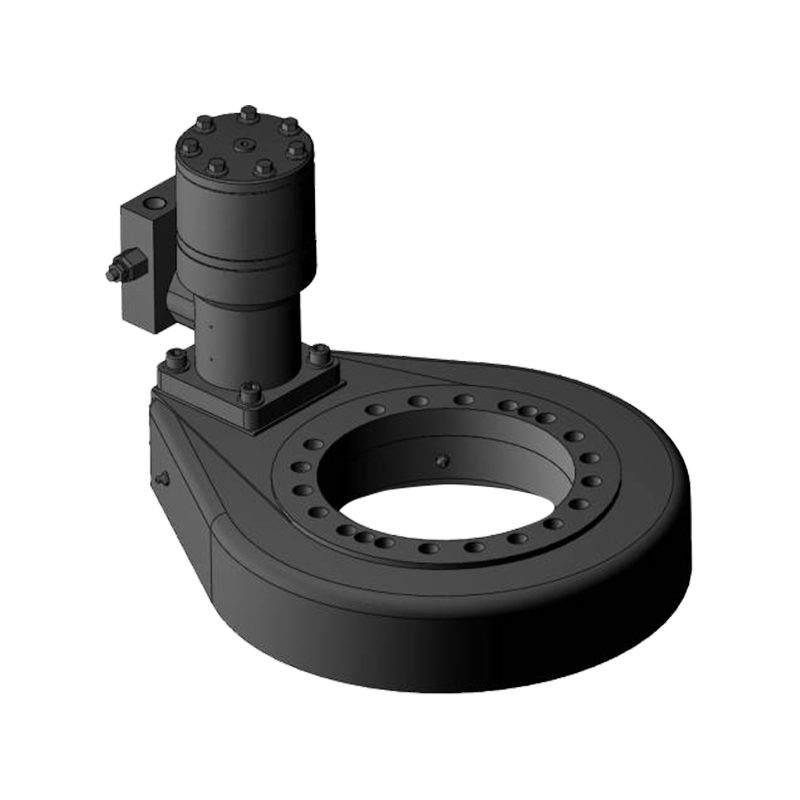
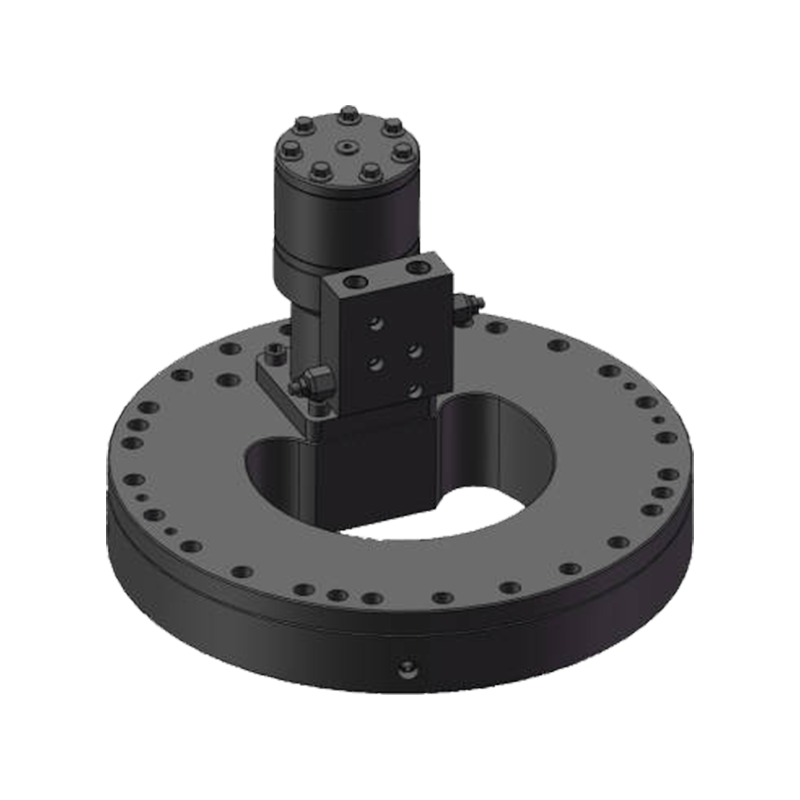
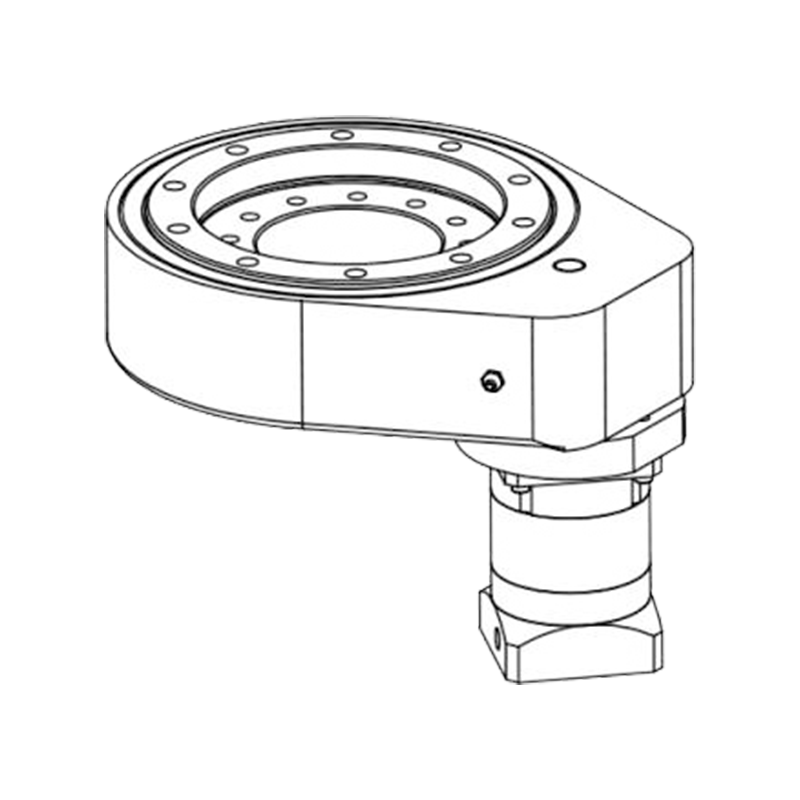
Horizontalni zakretni pogon potpuno je zatvoreni rotacijski aktuator koji kombinira redukcijski mehanizam pužnog zupčanika s ležajem zakretnog prstena u jednom integriranom kućištu. Okretni prsten podnosi radijalna, aksijalna i momentna opterećenja koja nameće gornja rotirajuća struktura, dok pužni zupčanik pruža mehaničku prednost potrebnu za pokretanje te rotacije s relativno malim ulazom motora. "Horizontalno" se odnosi na orijentaciju izlazne osi pogona — rotacija se događa oko okomite osi, što ga čini prirodnim izborom za primjene u kojima se struktura mora ljuljati, pomicati ili neprekidno okretati u vodoravnoj ravnini.
Za razliku od samostalnih zakretnih prstenova uparenih s vanjskim prijenosnicima, integrirani vodoravni zakretni pogon pojednostavljuje instalaciju, poboljšava integritet brtvljenja i smanjuje inženjerski napor potreban za projektiranje okolne strukture. Ova integracija upravo je razlog zašto oni dominiraju u aplikacijama kao što su solarni uređaji za praćenje, okretne platforme dizalica, radne platforme u zraku, sustavi zakretanja vjetroturbina i pozicioneri satelitske antene — svugdje gdje je potreban kompaktni, samostalni rotacijski pokretač s velikim kapacitetom opterećenja.
Analiza opterećenja: početna točka o kojoj se ne može pregovarati
Svaki odabir vodoravnog zakretnog pogona započinje kompletnom analizom opterećenja. Preskakanje ili približavanje ovog koraka najčešći je izvor prijevremenog kvara. Postoje tri kategorije opterećenja koje pogon mora istovremeno nositi, a sve tri moraju biti kvantificirane prije nego započne usporedba kataloga.
Aksijalno opterećenje
Aksijalno opterećenje djeluje paralelno s izlaznom osi pogona — u vodoravnom zakretnom pogonu, to je obično vlastita težina rotirajuće strukture iznad. Niz solarnih panela, nadgradnja gramofonske platforme dizalice ili sklop antene nameću svoju težinu prema dolje kroz pogon. Ovo je najjednostavnije opterećenje za izračunavanje: to je u biti ukupna masa svega što rotira iznad pogona, pomnožena s gravitacijskim ubrzanjem i izražena u kilonewtonima.
Radijalno opterećenje
Radijalno opterećenje djeluje okomito na izlaznu os — vodoravno, u slučaju vodoravnog zakretnog pogona. Pritisak vjetra na veliku ploču ili antenu je najčešći izvor radijalnog opterećenja u vanjskim primjenama. Ekscentrično opterećenje uzrokovano izvan središta gravitacije u rotirajućem sklopu također doprinosi radijalnoj komponenti. Radijalna opterećenja često su dinamička i promjenjiva u smjeru, što procjenu vršne vrijednosti čini kritičnom, a ne prosječnu vrijednost.
Preokretni trenutak
Moment prevrtanja je opterećenje savijanja koje pokušava nagnuti rotirajuću strukturu u odnosu na kućište pogona. Generira se kad god težište rotirajućeg sklopa nije izravno iznad rotacijske središnje crte pogona ili kada horizontalne sile (poput vjetra) djeluju na visini iznad ravnine montaže pogona. Moment prevrtanja izražava se u kilonewton-metrima i često je najzahtjevniji parametar opterećenja — mnogi pogoni koji prolaze provjere aksijalnog i radijalnog opterećenja ne uspijevaju postići kapacitet momenta prevrtanja.
Zahtjevi zakretnog momenta i dimenzioniranje motora
Nakon što se utvrde opterećenja, mora se izračunati potrebni izlazni moment. Ovo je okretni moment potreban na izlaznom prstenu pogona da se prevladaju sve sile otpora i ubrza opterećenje do potrebne brzine vrtnje unutar prihvatljivog vremena. Primarni čimbenici potrebnog okretnog momenta su trenje unutar ležaja zakretnog prstena (koje se povećava s aksijalnim opterećenjem i momentom prevrtanja), aerodinamički otpor na rotirajućoj strukturi i inercijski moment potreban tijekom faza ubrzanja.
Horizontalni zakretni pogoni određeni su njihovim nazivnim momentom držanja i nazivnim radnim momentom — to nisu iste brojke. Zakretni moment je maksimalno statičko opterećenje koje pogon može podnijeti bez rotacije; radni moment je kontinuirani moment koji je dostupan tijekom rada. Karakteristika samoblokiranja pužnog zupčanika (prisutna kada je vodeći kut ispod kuta trenja, obično kada prijenosni omjer prelazi približno 20:1) znači da mnogi horizontalni zakretni pogoni mogu zadržati svoj položaj pod opterećenjem bez posebne kočnice — značajka koja pojednostavljuje dizajn sustava u aplikacijama kao što su solarni uređaji za praćenje gdje pogon mora držati kut panela u odnosu na opterećenje vjetrom bez kontinuiranog napajanja motora.
Odabir motora slijedi iz potrebnog ulaznog momenta (izlazni moment podijeljen s prijenosnim omjerom, prilagođen za učinkovitost pogona) i potrebne ulazne brzine (izlazna brzina vrtnje pomnožena s prijenosnim omjerom). Većina vodoravnih zakretnih pogona prihvaća standardne IEC ili NEMA motore s okvirom, a mnogi se isporučuju spremni za motor s obrađenom prirubnicom za montiranje motora.
Usporedba ključnih parametara odabira
| Parametar | Što odrediti | Zajednički raspon | Rizik odabira ako nije specificiran |
| Aksijalno opterećenje Capacity | Ukupna rotirajuća masa × gravitacija | 5 kN – 2.000 kN | Deformacija prstena ležaja, zahvat |
| Preokretni trenutak | Ekscentrično opterećenje × krak momenta | 0,5 kNm – 500 kNm | Kvar zuba prstenastog zupčanika, naginjanje |
| Radni moment | Moment inercije otpora trenja | 0,5 kNm – 200 kNm | Preopterećenje motora, istrošenost pužnog prijenosnika |
| Izlazna brzina | Potrebna brzina obrtanja (°/min ili o/min) | 0,01 – 10 o/min | Pogreška pozicioniranja, toplinsko prekoračenje |
| Prijenosni omjer | Potreba za samozaključavanjem nasuprot učinkovitosti | 20:1 – 100:1 | Vožnja unatrag, potrebna kočnica |
Razmatranja okoliša i radnog ciklusa
Pogon koji ispunjava zahtjeve mehaničkog opterećenja na papiru ipak se može rano pokvariti ako je specifikacija okoline pogrešna. Horizontalni zakretni pogoni široko se koriste na otvorenom, često u teškim uvjetima, a kućište, brtvljenje i obrada površine moraju biti usklađeni s radnim okruženjem.
- IP ocjena: Za vanjske primjene općenito je potreban minimalni IP65 kako bi se isključila prašina i vodeni mlaz. Morsko ili obalno okruženje zahtijeva IP67 ili više, sa spojnicama od nehrđajućeg čelika i dodatnom zaštitom od korozije na izloženim površinama. Potvrdite da se IP ocjena odnosi na potpuno sastavljen pogon uključujući sučelje motora — neki pogoni imaju ocjenu IP65 na kućištu, ali imaju nezaštićene montažne površine motora koje postaju ulazne točke.
- Raspon temperature: Standardna maziva imaju dobre rezultate između -20°C i 80°C. Primjene u arktičkim okruženjima, pustinjskim instalacijama ili u blizini industrijskih izvora topline zahtijevaju specificirane masti za niske ili visoke temperature. Potvrdite specifikaciju maziva proizvođača pogona i temperaturni raspon koji pokriva prije dovršetka odabira za primjenu u ekstremnim klimatskim uvjetima.
- Radni ciklus: Horizontalni zakretni pogoni in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Zaštita od korozije: Standardni pogoni koriste čelična kućišta premazana cink-fosfatom i obojena prikladna za unutarnja okruženja. Obalne i offshore instalacije zahtijevaju vruće pocinčana kućišta, izlazne prstene od nehrđajućeg čelika ili površine obložene epoksidom, ovisno o kategoriji korozivnosti mjesta.
Konfiguracija montaže i geometrija sučelja
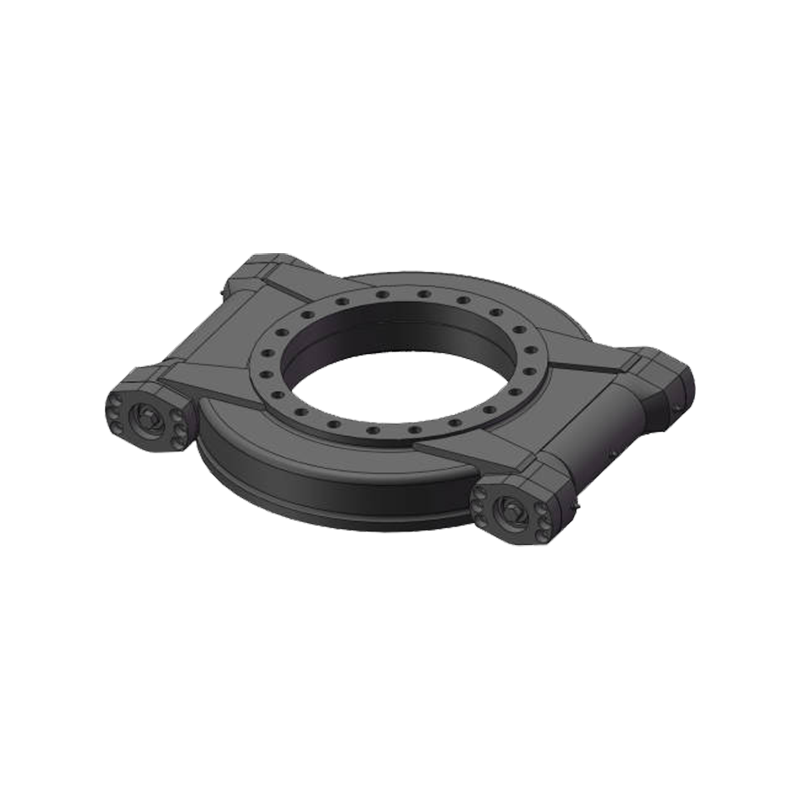
Fizička integracija zakretnog pogona u okolnu strukturu praktično je ograničenje koje se mora riješiti tijekom odabira, a ne tijekom instalacije. Horizontalni zakretni pogoni dostupni su s različitim konfiguracijama izlaznog prstena — vanjski zupčanik (zubi s vanjske strane izlaznog prstena), unutarnji zupčanik (zubi s unutarnje strane) i bez zuba (pogon trenjem ili izravna veza) — svaki odgovara različitim kinematičkim rasporedima. Vanjski izlazni prstenovi zupčanika najčešći su i omogućuju postavljanje pužne osovine izvan promjera prstena, čime su motor i mjenjač dostupni za održavanje. Konfiguracije unutarnjeg zupčanika koriste se kada pogon mora biti integriran u kompaktni rotirajući sklop.
Dimenzije kruga vijaka i na fiksnom kućištu i na rotirajućem izlaznom prstenu moraju se provjeriti u odnosu na spojnu strukturu. Mnogi proizvođači nude prilagođene uzorke vijaka, montažne prirubnice i sučelja izlazne osovine kao standardne opcije — određivanje istih u fazi naručivanja daleko je jeftinije od obrade adaptera na terenu. Također provjerite promjer otvora ako kablovi, hidraulični vodovi ili pneumatska crijeva moraju prolaziti kroz središte pogona — nemaju svi vodoravni zakretni pogoni središnji provrt, a naknadna oprema ove značajke nije moguća.

Sigurnosni faktori i očekivani radni vijek
Objavljene vrijednosti nosivosti za vodoravne zakretne pogone obično se temelje na statičkom dokaznom opterećenju ili izračunima dinamičkog vijeka trajanja, a primjena odgovarajućeg faktora sigurnosti iznad izračunatog radnog opterećenja standardna je inženjerska praksa. Za većinu aplikacija koje nisu kritične za sigurnost, prikladan je faktor sigurnosti od 1,5× do 2× na radni moment i nosivost. Za primjene u kojima kvar pogona predstavlja rizik za osoblje — radne platforme u zraku, medicinska oprema za pozicioniranje ili dizalice montirane na vozila — mogu se navesti faktori sigurnosti od 3× ili više, a certificiranje treće strane prema relevantnim sigurnosnim standardima strojeva (kao što je EN 13000 za dizalice ili ISO 11684 za poljoprivrednu opremu) treba potvrditi kod proizvođača pogona.
O očekivanom radnom vijeku treba raspravljati u smislu životnog vijeka ležaja L10 (broj radnih sati pri kojima se očekuje da će 10% populacije identičnih pogona pokazati kvar ležaja uslijed zamora) i životnog vijeka površine pužnog zupčanika zbog zamora. Za aplikacije solarnog praćenja, projektirani životni vijek od 25 godina je industrijska norma; potvrditi da se proizvođački izračun L10 životnog vijeka temelji na stvarnom radnom profilu opterećenja aplikacije, a ne na generičkom referentnom stanju.
Praktični kontrolni popis prije finaliziranja vašeg odabira
- Potvrdite aksijalno opterećenje, vršno radijalno opterećenje i maksimalni moment prevrtanja u najgorem slučaju (obično maksimalna brzina vjetra u kombinaciji s maksimalnim ekscentričnim opterećenjem)
- Provjerite da nazivni radni moment odabranog pogona premašuje izračunati potrebni izlazni moment za odabrani faktor sigurnosti
- Provjerite prijenosni omjer za samoblokiranje ako je potrebno pasivno držanje položaja ili potvrdite specifikaciju kočnice ako nije
- Potvrdite da IP ocjena, raspon temperature i zaštita od korozije odgovaraju okruženju instalacije
- Provjerite dimenzije kruga vijka, konfiguraciju izlaznog prstena i zahtjeve središnjeg provrta u odnosu na dizajn spojne strukture
- Zatražite izračun životnog vijeka ležaja L10 na temelju stvarnog profila opterećenja primjene, a ne kataloških referentnih uvjeta
- Potvrdite kompatibilnost sučelja motora — veličina okvira, promjer osovine i standard montažne prirubnice (IEC ili NEMA)
- Pregledajte specifikaciju podmazivanja i interval ponovnog podmazivanja prema planiranom rasporedu održavanja
Odabir vodoravnog zakretnog pogona nagrađuje metodičku analizu. Sami pogoni robusne su, dobro dokazane komponente — kvarovi koji se dogode na terenu gotovo se uvijek mogu pratiti prema nedovoljno određenom parametru opterećenja, neusklađenoj ocjeni zaštite okoliša ili previđenom ograničenju sučelja. Sustavno prođite kroz svaku od gore navedenih varijabli, uključite inženjersku podršku proizvođača kada su uvjeti primjene neuobičajeni, a rezultat će biti pogon koji radi pouzdano tijekom cijelog predviđenog vijeka trajanja sustava koji pokreće.

Jiangsu Manchen Transmission Technology Co., Ltd. Excels u stvaranju prilagođenih, pouzdanih i preciznih ležera za različite industrije, kontinuirano inovirajući kako bi zadovoljili najviše standarde i tražeći mogućnosti suradnje. Pouzdani i postojani dobavljač ležaja u Kini.
Veze proizvoda
Kontaktirajte nas
-
Address:Br. 8, Nanqiu Road, grad Huangtu, grad Jiangyin , Kina
-
Tel:+86-13646122221
-
E-mail:
-
E-mail:ma@slewingbearingcn.com
